物理机械振动
机械振动
将小球放在弹簧一端,固定弹簧另一端,这样的系统叫做弹簧振子。
将小球向右拉,随后放开,它就左右运动起来。小球原先静止的位置叫做平衡位置,小球在平衡位置附近的往复运动,是一种机械振动,简称振动。
简谐振动
简谐振动是最简单最基本的机械振动。
当物体所受合力始终指向平衡位置,且大小与物体相对平衡位置的位移 成正比时,物体做简谐振动。
简谐振动中,物体相对平衡位置的位移 与时间 的图像,遵从正弦函数规律,也就是:
我们可以尝试证明一下。
可以发现,此时 与 成正比, ,.
上述推导过程反过来也是成立的。
单位圆
在高中范围内,还有一种单位圆的方法,通过将直线上的运动映射到单位圆上,以研究简谐振动的性质。
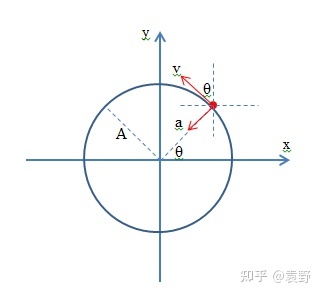
对于一个在单位圆上做匀速圆周运动的物体,其在 轴上的投影关于原点 做简谐振动。
设单位圆上运动的点为 ,其在坐标轴上的投影为 ,我们很容易得到二者之间的关联。
,.
由匀速圆周运动性质,我们很容易得到 点所受合力:.
合力沿水平方向的分力 .
对于 点,我们有:,.
这与我们上面的推导是一致的。
至此,我们就说明了,简谐运动可以看作单位圆上匀速圆周运动在水平方向上的投影。
在后面讲相位时,还会再次提到单位圆。
物理量
一般来说,我们取 ,那么 ,其中 为振幅, 为角频率。
-
振幅 :振动物体离开平衡位置的最大距离。
-
全振动:在间歇运动中,振子第一次向右经过某点 ,当它下一次再以相同速度经过点 时,振子完成一次全振动。
-
周期 :完成一次全振动所需的时间。
-
频率 :单位时间内完成全振动的次数,.
-
振子刚度 ,,由系统的力学性质决定的常量。.
-
角频率 ,由正弦函数的性质,,代表该振动在单位圆上的角速度。
特别地,角频率是由系统的力学性质决定的,对于给定的弹簧振子,角频率仅与自身的刚度和质量有关,有:
计算周期,我们可以用整圆 除以单位圆上的角速度 得到:
常见的简谐运动
弹簧振子模型是最经典的简谐运动。
固定弹簧一端,弹簧另一端连接小球,将小球拉开一段距离,松手,小球以原先的静止位置为平衡位置,做简谐运动。
在实际摆中,如果细线质量极小,线的长度极大,摆动角度极小,我们将这样的装置叫做单摆,它是实际摆的理想化模型。
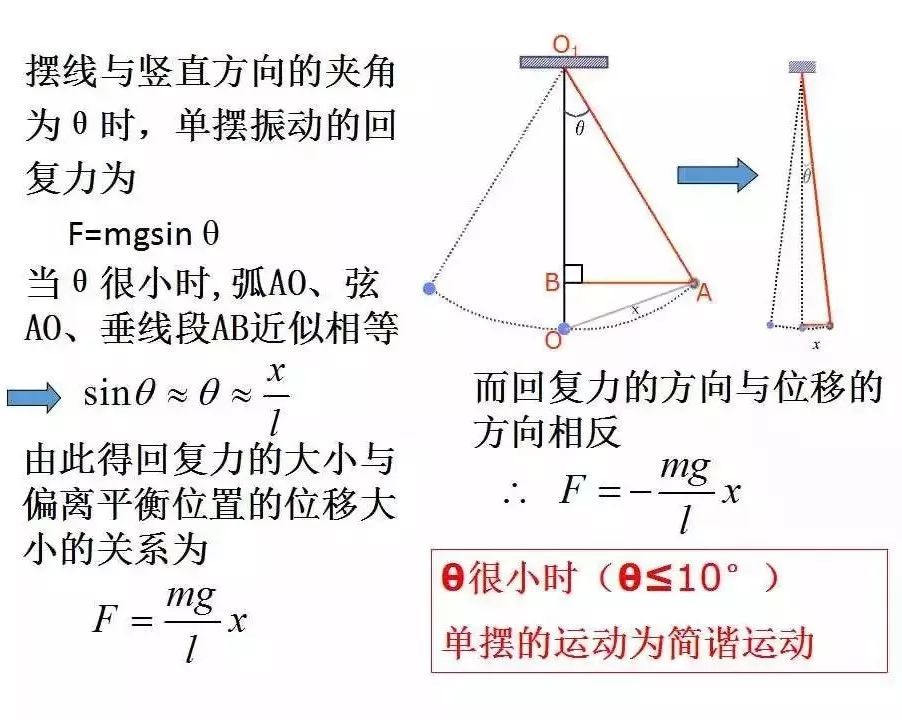
在单摆中,因为角度极小,我们近似地将小球的水平位移与小球经过的弧长等效。
单摆的回复力可以写为:,也就是说,.
单摆的圆频率 ,周期 .
有趣的是,单摆的周期仅与绳长有关,绳子越长,周期越大。
振动能量
以弹簧振子为例,在振动中任意时刻 ,速度和位移分别满足:
振子的动能 ,弹簧的弹性势能 可以分别计算:
不难发现,.
在振动过程中,系统机械能守恒,总能量只与角频率和振幅有关。
阻尼振动
简谐振动是理想化的模型,如果在振动过程中,振子总是受到阻力,那么系统机械能逐渐减小,振幅也逐渐减小,直到最终停止。
振幅逐渐减小的振动叫阻尼振动,虽然振幅减小,但振动周期不变。
振幅保持不变的振动叫无阻尼振动。
受迫振动
振动物体如果在周期性外力——策动力作用下振动,那么它做受迫振动。
受迫振动稳定时,振动周期和频率等于策动力的周期和频率,而与振动物体的固有周期或频率无关。
虽然受迫振动的周期和频率与振动物体的固有周期、频率无关,但受迫振动的振幅与策动力的周期与物体的固有周期有关。
策动力周期与物体固有周期相差越小,受迫振动的振幅越大,当二者相等时,受迫振动的振幅最大,叫做共振。
当策动力跟振动“合拍”时,每次驱动力都与物体速度方向一致,驱动力总是做正功,所以振幅越来越大。当不“合拍”时,一部分做正功,一部分做负功,无法引起共振。
相位
我们可以通过
如果物体的起振点不在平衡位置,那么 时,在参考圆上的 不为零。
此时我们可以计算出起振点对应的相位,而修正我们的式子:
是起振点在参考圆上的角度,称为初相位。
是振动中的物体在参考圆上对应的角度,有 ,称为相位。
机械波
机械波有横波与纵波。
横波的振动方向与传播方向垂直,纵波的振动方向与传播方向平行。
形象地,横波以正弦波形式传播,纵波以弹簧波形式传播。
一般来说,我们在高中阶段,横波研究得较多。
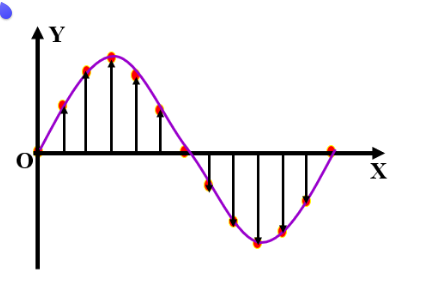
波的图像
波的图像,是指在某一个特定时刻,记录许多质点偏离平衡位置的位移,得到 图像。
物理量
-
周期 与频率 ,介质中各个质点的振动周期与频率相同,都等于波原的振动周期或频率。波的频率仅由振源决定,与介质无关。
-
波长 ,在波动中,振动步调总是相同的两个相邻质点间的距离,叫做波长。一般来说,我们选取相邻的两个波峰或波谷,他们之间的距离就是波长。波长由频率与波速决定。
-
波速 ,经过一个周期,振动在介质中传播的距离等于一个波长,所以定义波速 .
波速由介质决定,与振源无关。 -
波数 ,指 长度上出现的全波数目,.
波的叠加
当两列波相遇时,它们保持原有的特性,继续按原来的方向传播,互不干扰。
在重叠区域,介质中的质点同时参与两种振动,位移等于这两种波引起的位移的矢量和。
频率相同的两列波叠加,某些区域的振动加强,某些区域振动减弱,并且振动加强和振动减弱区域互相间隔的现象,叫做波的干涉。
振动加强条件:参考点到两相干波源的距离差
振动减弱条件:参考点到两相干波源的距离差
减弱叠加后,振动消失。
链接到此文档的相关文档
📙